Was sind die wichtigsten technischen Spezifikationen des mobilen Roboters?
Der mobile Roboter ist eine im Team entwickelte Forschungsanlage zur experimentellen Erprobung großflächiger Lasermaterialbearbeitungsprozesse wie zum Beispiel Schneid- oder Schweißanwendungen.
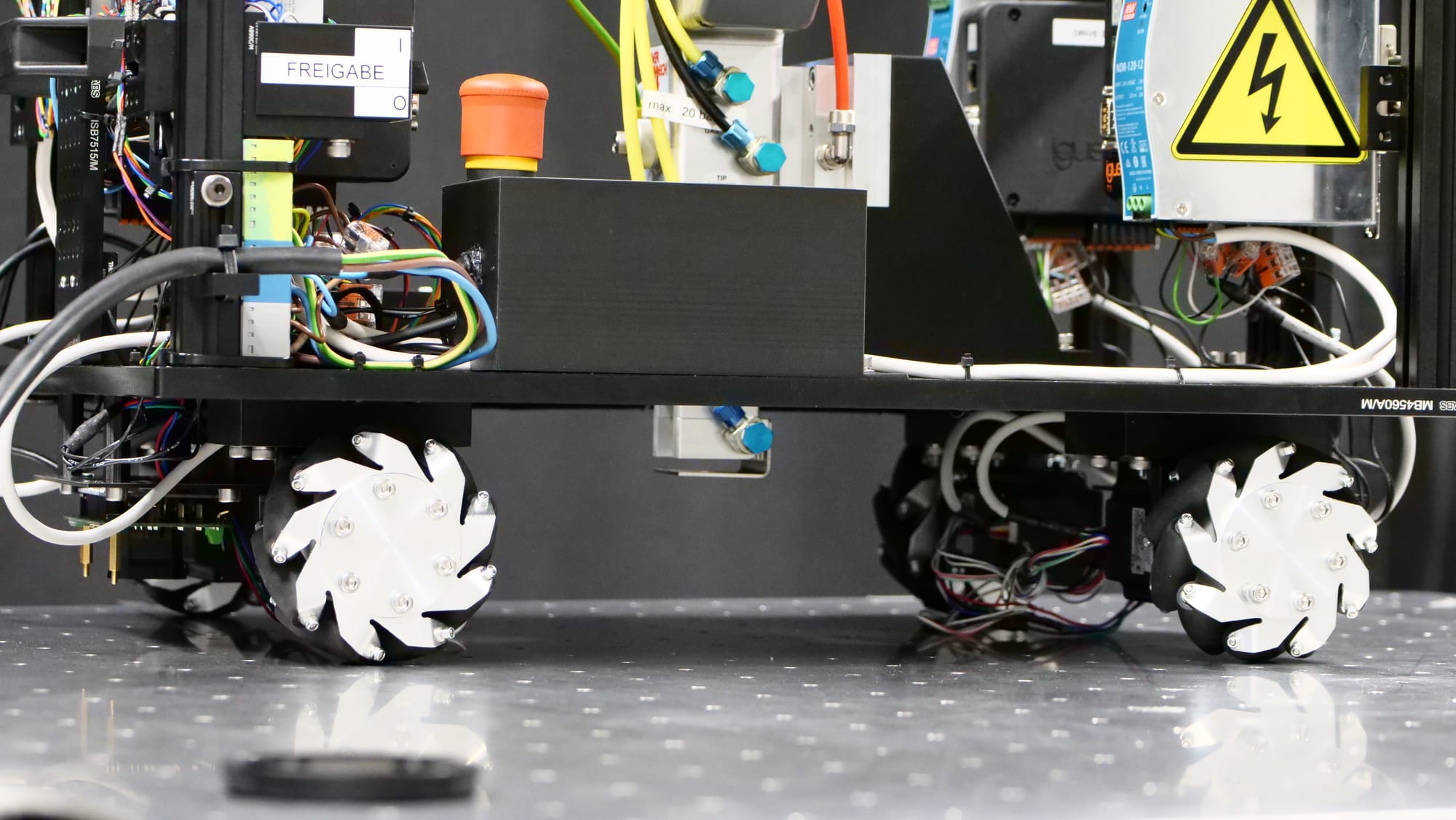
Die aktuell verwendete Laserstrahlquelle ist ein Faserlaser mit bis zu 1 kW Leistung und einem Laserstahldurchmesser von > 100 µm. Die Geschwindigkeit ist einstellbar bis maximal 200 mm/s. Der mobile Roboter ist mit verschiedenen Sensoren zur Positionserkennung, zum Beispiel Encodern an den Rädern, einem Linienscanner zur Naht- und Stoßerkennung sowie zweier 2D-Sensoren für Positionsänderungen, ausgestattet.
In welchen Bereichen nutzt ihr den mobilen Roboter? Welche Vorteile ergeben sich dadurch?
Die Anlage ist aktuell eine reine Forschungsanlage, mit der grundsätzlich die Machbarkeit großflächiger Lasermaterialbearbeitungsprozesse untersucht werden soll. Dazu gehören aktuell Bauräume von mindestens 4 m x 2m. Erste Tests wurden bereits mit Schweißversuchen durchgeführt. Der große Vorteil des Konzepts liegt in der Skalierbarkeit der Anlage: Wird eine Anlage aktuell mit dem Bauraum auch immer teurer, kann ein mobiles System größere Räume zum gleichen Preis, aber auch gleichbleibenden Ressourcenbedarf abdecken. Anwendungsfälle zum Beispiel bei Schweißaufgaben im Schiffsbau wären aktuell denkbar. Ziel ist es, die Machbarkeit des Konzepts erstmalig zu beweisen. Hauptproblem ist aktuell, wie zu erwarten, die Positioniergenauigkeit des Systems auf dem Bauteil.
Wie wird der mobile Roboter im Forschungscampus DPP eingesetzt?
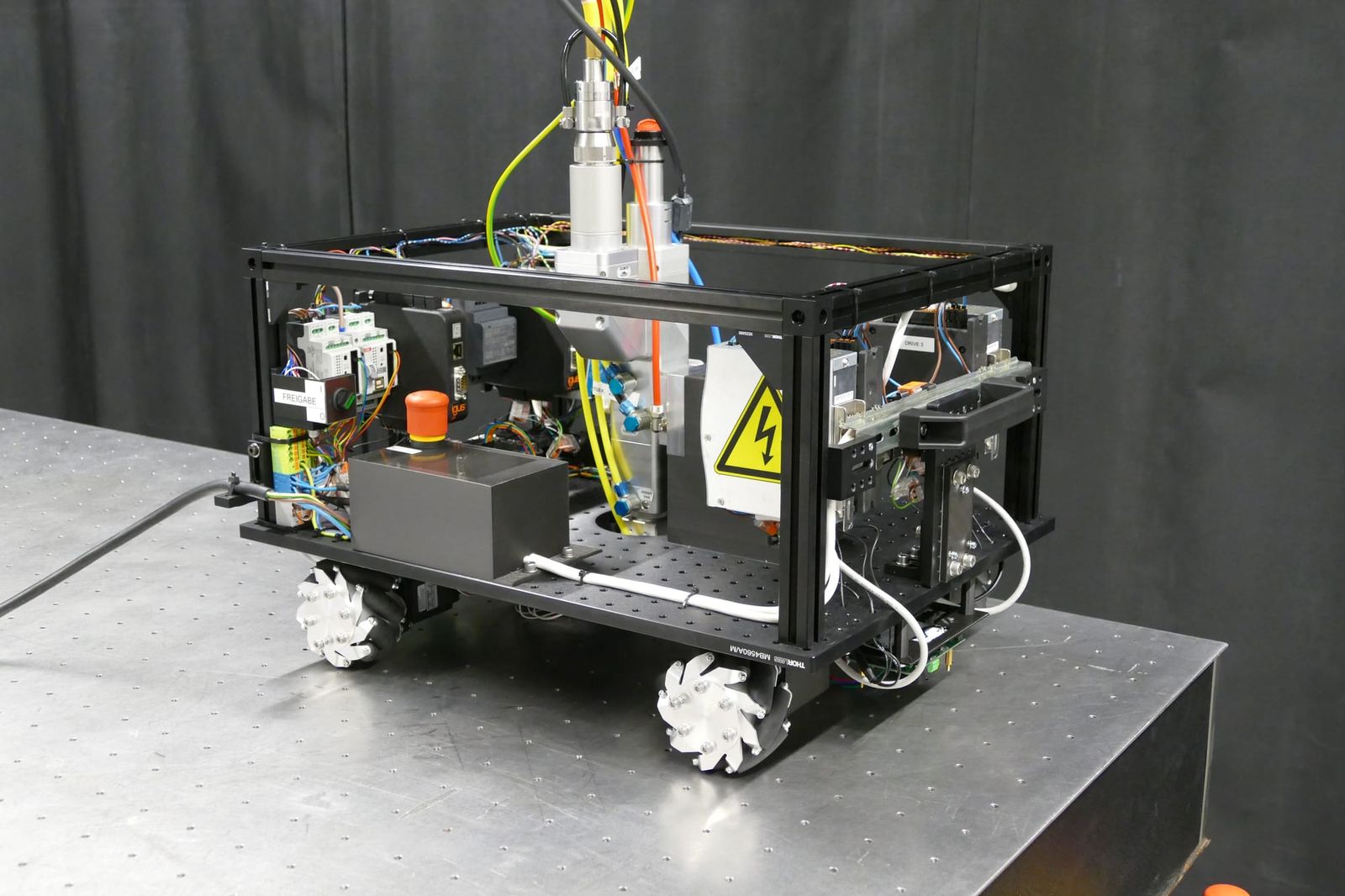
Im Rahmen des Forschungscampus DPP wurde das Konzept der Gesamtanlage erstmalig entwickelt, getestet und schließlich aufgebaut. Eine Eigenentwicklung war notwendig, um Zugriff auf alle Komponenten sowie die Software zu haben und so das Design agil anpassen zu können. Beispielweise wurde die Positionierung der Laseroptik in die Mitte der Bodenplatte verlegt. Nun, da der erste Prototyp endgültig fährt, sollen als nächstes reale Schweißprozesse an Stumpfstößen getestet werden. Falls möglich, könnte eine kooperative Nutzung mehrerer Systeme die Durchlaufzeiten erheblich verkürzen: Das bietet wiederum erhebliches Potenzial für ein zukünftiges Forschungsthema.